您現在的位置是:首頁 >綜合 > 2020-12-08 09:01:54 來源:
地面機器人深度估計和相對定位的框架
導讀 葡萄牙波爾圖大學和瑞典KTH皇家理工學院的研究人員最近開發了一個框架,該框架可以估算正在協作完成給定任務的兩個地面機器人的深度和相對
葡萄牙波爾圖大學和瑞典KTH皇家理工學院的研究人員最近開發了一個框架,該框架可以估算正在協作完成給定任務的兩個地面機器人的深度和相對姿態。在arXiv上預先發表的一篇論文中概述了它們的框架,可以幫助提高多個機器人在涉及探索,操縱,覆蓋,采樣和巡邏以及搜索和救援任務的任務中的性能。
近年來,研究人員進行了越來越多的研究,旨在開發解決方案以有效地協調分散架構中的多個機器人。為了有效地完成一組任務,群或編隊中的各個機器人應至少部分了解周圍環境中其他特工的姿勢。
這種與姿勢有關的數據(稱為相對姿勢信息)使代理可以優化給定目標的功能,重新計劃其軌跡并避免與其他機器人發生碰撞。但是,在某些實際環境中,特工可能難以獲得準確的相對姿勢估計。例如,在偏遠地區或僻靜地區執行極端任務時,機器人可能會遇到通訊通道以及高精度定位或運動捕捉系統的問題。
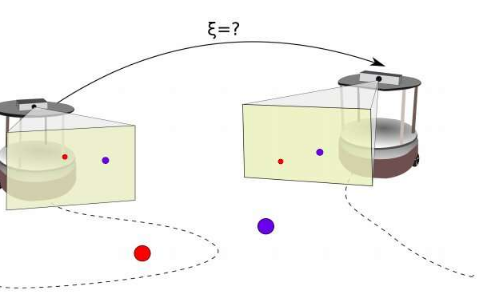
考慮到這一點,來自波爾圖大學和KTH的研究人員團隊著手開發一種框架,該框架可以增強為共同目標而共同努力的地面機器人的3-D深度估計和相對姿勢估計。他們特別關注了一種場景,其中涉及兩輛自動地面車輛在未知的環境中航行,均配備了透視相機。
研究人員在論文中解釋說:“深度估計問題旨在恢復環境的3D信息。” “相對定位問題包括通過感知彼此的姿勢或共享有關感知環境的信息來估計兩個機器人之間的相對姿勢。”
機器人中用于深度估計和相對定位的大多數現有解決方案都是通過分析不連續的數據集來工作的,而無需考慮事件的時間順序。另一方面,研究人員提出的方法考慮了兩個機器人分別通過其相機收集的信息,然后將其組合起來以計算它們之間的相對姿勢。由兩個代理和輸入命令收集的深度估計信息被饋送到擴展卡爾曼濾波器(EKF),該濾波器設計用于處理此數據并估計機器人之間的相對姿態。
")





")
")
")
")
")
")
")
")
")
")