您現在的位置是:首頁 >綜合 > 2020-11-01 08:41:30 來源:
一種改善機器人室內導航的系統
在過去的十年左右的時間里,機器人專家開發了越來越復雜的機器人系統,可以幫助人們在家中和其他環境中完成各種任務。但是,為了幫助用戶,這些系統應該能夠有效地導航和探索周圍的環境,而不會與周圍的其他物體碰撞。
盡管現在有許多導航系統和技術,但是大多數機器人的移動性仍然相當有限,尤其是在未知和未映射的環境中。現有的大多數導航方法都有兩個主要組成部分:一個被設計為構造一個地圖,供機器人用作參考(例如,同時定位和制圖技術);另一個是為機器人生成無碰撞或最佳路徑的地圖(例如,概率路線圖或快速探索隨機樹)。
盡管這些方法中的某些方法取得了可喜的結果,但它們往往對機器人傳感器拾取的噪聲高度敏感。結果,他們經常嚴重依賴地圖,在動態或快速變化的環境中表現不佳。不依賴地圖的基于深度學習的導航方法最終可以幫助克服這些系統的局限性。
南京航空航天大學和中國國防科技大學的研究人員最近開發了一種新系統,可以在室內環境中實現更高效的機器人導航。該系統不再依賴于預定義的地圖,而是使用一種稱為生成模仿學習的訓練方法,使機器人能夠導航周圍的環境并實現其目標。
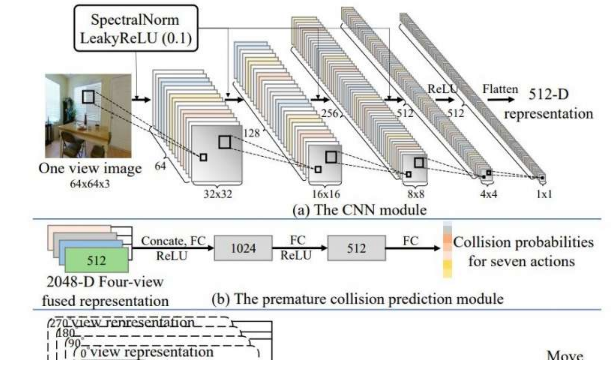
研究人員在論文中寫道:“我們的方法在每個時間步均以對機器人和目標的多視角觀察作為輸入,以提供一系列動作,將機器人移至目標,而無需在運行時依靠里程表或GPS。” 。
研究人員設計的導航系統具有三個關鍵組件。第一個是經過人類演示訓練的變體生成模塊,旨在在機器人開始計劃其動作之前預測環境的變化。
第二部分預測靜態碰撞,從而提高機器人導航的安全性。最后,目標檢查模塊使用此信息來設計更有效的導航策略,從而考慮機器人試圖達到的最終動作或目標。
研究人員在論文中解釋說:“三個提出的設計都有助于提高訓練數據的效率,避免靜態碰撞以及導航通用化性能,從而產生了一種新型的目標驅動無地圖導航系統。”
將來,由南京航空航天大學和國防科學技術大學的研究團隊引入的新系統可以用于增強其他設計用于在人的家庭,辦公室或其他室內環境中運行的機器人的導航。 。此外,該系統獲得的結果可能會激發其他研究人員創建類似的工具,以實現機器人中目標驅動的更有效導航。
到目前為止,導航系統已經通過使用Turtlebot(由Willow Garage的兩名工程師創建的低成本機器人平臺)在一系列實際實驗中進行了評估。這些測試的結果很有希望,因為該系統很容易集成到機器人中,并使其能夠更有效地在室內環境中導航。
")


")


")



")
")
")
")
")
![峰值[地面]位移(關于峰值[地面]位移簡介)](http://www.138071.com/uploadfile/2023/0519/thumb_100_100_9c6242d266dc9a6c93748f36886890dc254_t.jpg "峰值[地面]位移(關于峰值[地面]位移簡介)")
")
")
")