您現在的位置是:首頁 >市場 > 2020-11-30 09:41:37 來源:
評估和比較可自我重構的機器人系統的框架
能夠自動改變形狀并適應其周圍環境的自重構機器人(SRR)最近在機器人研究界引起了很多興趣。這些機器人可以具有多種有用的應用程序,因為它們可以在感知周圍環境以及計劃和執行適當的動作方面獲得高度的自主權。盡管過去的研究已經引入了將這些機器人分類為子組的方法,但是仍然沒有用于評估其性能的標準程序。
考慮到這一點,中國中山大學和新加坡科技設計大學的研究人員最近開發了一種可自我重構機器人的分類和評估(TAEV)框架。他們的研究以IEEE Access為特色,由新加坡國家機器人研究與發展計劃辦公室資助。
進行這項研究的研究人員之一阿卜杜拉·阿米爾·哈亞特(Abdullah Aamir Hayat)告訴TechXplore:“到目前為止,研究人員已經設計了一種定性方法來對SRR進行分類,但沒有定量方法可以指導設計者,制造商和機器人用戶。” “這促使我們為SRR開發一種框架和評估方法。”
在SRR中,改變形狀以完成給定任務的能力主要取決于機器人采用的機制類型及其自治程度。雖然某些SRR系統是完全自治的,但其他系統則需要一定程度的手動遙控操作。
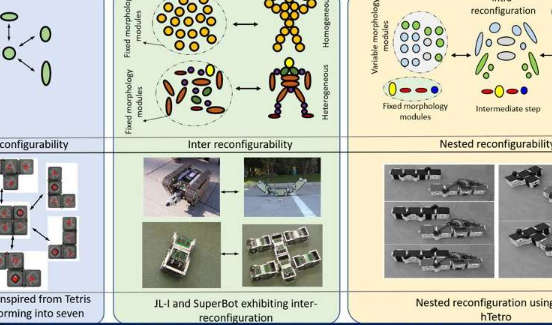
在機械方面,可以將機器人分為三大類:具有內部,內部和嵌套重新配置的機器人。內部和內部重新配置之間的區別在于,機器人可以使用的配置數量以及這些配置的規模。
內部可重新配置性涉及單個機器人模塊,該模塊可以在不進行任何組裝或拆卸的情況下更改其形態,而內部可重新配置性涉及可以組裝或拆卸的兩個或多個模塊。最后,由Mohan Rajesh Elara教授和Kristin L. Wood教授共同提出的嵌套重配置結合了內部重配置和內部重配置的功能。
Hayat及其同事在論文中介紹了可用于評估SRR,量化其自治程度和可用配置數量的指標。將這些指標結合起來可以創建一個TAEV框架,該框架可以指導研究人員和制造商評估其機器人系統。
")









")
")
")
")
")
")
")
")
")