您現在的位置是:首頁 >要聞 > 2020-12-19 08:32:35 來源:
大阪團隊微調四足機器人Pneupard
導讀 (Phys org)—點擊,cl 、,、啪啪啪啪聲走在世界各地眾多四足機器人的腳步上,但是最近的一份報告集中在一個步行機器人Pneupard上,這是大
(Phys.org)—點擊,cl 、,、啪啪啪啪聲走在世界各地眾多四足機器人的腳步上,但是最近的一份報告集中在一個步行機器人Pneupard上,這是大阪大學的一個項目。周二的IEEE Spectrum表示,由氣動肌肉驅動的四臂機器人Pneupard已經對其研究人員進行了微調。團隊設計的原始版本的Pneupard具有很多氣動肌肉。更新說,控制機器人成為一個巨大的挑戰,研究人員決定這次要精益求精,要對機器人的解剖結構有所了解。第二個版本的肌肉較少。這使得控制和探索不同步態變得更加容易。
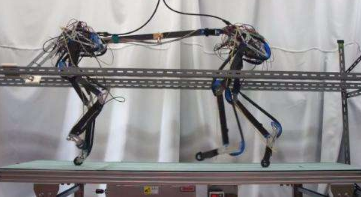
去年,IEEE Spectrum首次推出了Pneupard,它是一種以氣動人造肌肉為主要運動方式的機器人。杰森·法爾科納(Jason Falconer)當時寫道:“氣動人造肌肉可能是由包裹在尼龍中的橡膠管制成的,但充滿空氣后它們會像真實物體一樣收縮,它們可以在短時間內壓縮很多力量,并且具有很高的柔韌性耐沖擊性,使它們具有栩栩如生的品質,而電動馬達通常不具備這種品質。”
區別特征包括機器人不需要什么,而不是它需要什么;它不需要復雜的大腦,也不需要地面反饋或傳感器。IEEE Spectrum 說,就控制系統而言,這是一個“開環”實驗。一個簡單的,有節奏的控制器在起作用,稱為中央模式發生器(CPG)。
ExtremeTech的瑞恩·惠特瓦姆(Ryan Whitwam)說:“沒有任何外部信號告訴四肢如何運動,而是一切都基于氣動肌肉和骨骼框架的相互作用,這種相互作用在每一步之后都有規律地循環回到其起始位置。CPG這樣的系統本質上是一個生物系統,因此可以使未來的機器人更加栩栩如生。”
")





")
")
")
")
")
")
")
")
")
")