您現在的位置是:首頁 >要聞 > 2020-12-17 13:48:32 來源:
機器人從軟過渡到剛性
導讀 甚至章魚也理解肘部的重要性。當這些松軟,松散的頭足類動物需要做出精確的運動(例如將食物引導到他們的嘴中)時,觸手中的肌肉會收縮以形成
甚至章魚也理解肘部的重要性。當這些松軟,松散的頭足類動物需要做出精確的運動(例如將食物引導到他們的嘴中)時,觸手中的肌肉會收縮以形成臨時的旋轉關節。這些關節限制了手臂的擺動,從而實現了更加可控的運動。
現在,哈佛大學約翰·保爾森工程與應用科學學院(SEAS)和威斯生物啟發工程學院的研究人員展示了多層結構如何使機器人模仿章魚的運動學,并根據指令創建和消除關節。該結構還可以使機器人快速改變其剛度,阻尼和動力學。
這項研究發表在《高級功能材料》和《IEEE機器人與自動化快報》上的兩篇論文中。
SEAS研究的第一作者兼研究生Yashraj Narang表示:“這項研究有助于彌合軟機器人技術與傳統剛性機器人技術之間的鴻溝。” “我們認為這類技術可能會促進新一代不能簡單地歸類為軟性或剛性的機器和結構。”
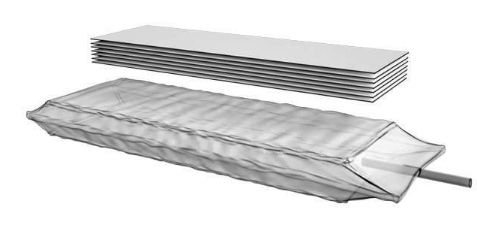
該結構出奇的簡單,由多層柔性材料包裹在塑料外殼中并連接到真空源組成。如果沒有真空,該結構的行為將完全符合您的預期,彎曲,扭曲和滑落而不會保持形狀。但是,當施加真空時,真空會變硬并可以保持任意形狀,并且可以模制成其他形式。
這種過渡是層流阻塞現象的結果,其中壓力的施加會產生摩擦力,從而使一組柔性材料牢固地結合在一起。
納朗說:“壓力產生的摩擦力就像膠水一樣。” “我們可以通過更改層數,調整施加到其上的壓力以及調整多層堆疊之間的間距來控制結構的剛度,阻尼,運動學和動力學。”
該研究小組還廣泛地模擬了層流干擾的力學行為,該研究小組包括Abbott和James Lawrence工程學教授Robert Howe,Abbott and James Lawrence材料工程教授Joost Vlassak和SEAS研究生Alperen Degirmenci。更好地控制其功能。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")