您現在的位置是:首頁 >要聞 > 2020-12-17 08:43:12 來源:
RoboTurk機器人模仿學習的眾包平臺
模仿學習是機器學習的一個分支,可以訓練機器模仿人類的行為,同時完成特定的任務。這些技術解決了強化學習的一些缺點,例如探索和獎勵規范,在機器人技術領域顯示出巨大的希望。
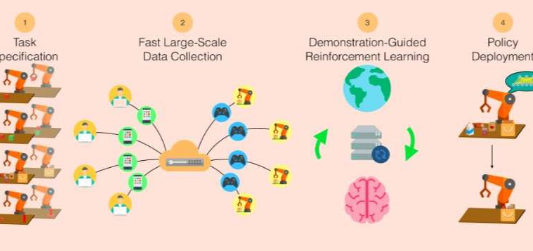
盡管取得了令人鼓舞的結果,但由于難以使用現有方法收集大量任務演示,因此模仿學習研究迄今僅限于中等規模的數據集。為了解決這些局限性,由斯坦福大學的Silvio Savarese博士和Lii-Fei Li博士督導的一組研究人員開發了RoboTurk,RoboTurk是一個眾包平臺,可使用廣泛使用的智能手機設備進行基于6自由度軌跡的高質量遠程操作。
進行這項研究的研究人員之一阿杰·曼德卡爾(Ajay Mandlekar)告訴TechXplore:“我們想為機器人技術創建像ImageNet這樣的東西。” “我們認為數據是機器人學習領域的關鍵限制。盡管有很多方法可以從數據中學習,例如數據驅動的控制和強化學習,但大多數方法都是收集自己的數據。因此,數據通常是低質量的,例如導致機器人隨機移動手臂。這種探索可能既困難又不安全,但我們相信人類可以提供幫助。”
ImageNet是由李博士創建的著名圖像數據庫,通常用于計算機視覺和對象識別研究。由斯坦福視覺與學習實驗室開發的眾包平臺旨在用作機器人技術和模仿學習研究的類似資源。
“與ImageNet不同,這樣的數據收集系統必須是動態的,允許我們重復地,經常地按需收集數據,甚至可以使用協作學習來收集數據,”也參與了Roboturk開發的朱克(Yuke Zhu)告訴TechXplore。“這是因為收集的數據取決于機器人在環境中采取的動作類型。”
研究人員的最終目標是對機器人進行高級操作技能的培訓,使他們能夠在工業環境中完成包裝或組裝等任務。他們發現,盡管模仿學習在這種情況下顯示出巨大的潛力,但由于難以收集大量任務演示,現有的數據集非常有限。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")