您現在的位置是:首頁 >要聞 > 2020-12-16 17:17:13 來源:
基于ToM的機器人倉庫人的意圖估計算法
物流業務的快速增長催生了對更先進,更高效的倉庫系統的需求。機器人技術的進步可以通過使當前由人類完成的任務自動化來幫助滿足這些需求,從而大大加快工作流程。
但是,為了安全高效地進行操作,機器人倉庫助理應能夠識別其操作員的意圖。薩格勒布大學和卡爾斯魯厄理工學院的研究人員最近開發了一種基于心理理論(ToM)原理的人類意圖估計算法。ToM是人類識別其他人的意圖,信念,欲望,情緒和精神狀態的能力。
“我們的研究源自歐盟的Horizo??n 2020項目SafeLog,該項目旨在允許人類安全進入全自動倉庫,在這里,移動機器人可以在不關閉整個機器人團隊的情況下就隨身攜帶架子,” David Puljiz說道,進行這項研究的研究人員告訴TechXplore。“這是通過使用專門設計的安全背心和AR設備來指導和幫助工人在這種環境中航行來完成的。”
為了增強安全性,研究人員設計的倉庫安全系統規劃了機器人的行進路線,以免與人工沖突。為了使其正常工作,它需要知道操作員的去向,特別是如果操作員沒有前往事先約定的位置。
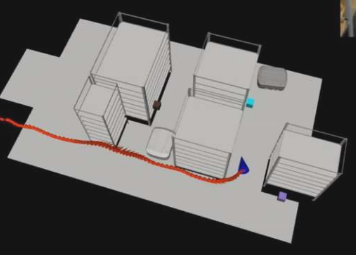
Puljiz和他的同事觀察了單個工人在倉庫環境中的運動,并使用一種稱為基于廣義Voronoi圖的規劃方法對他們的目標位置進行了驗證。然后,將這些觀察結果輸入到隱藏的馬爾可夫模型中,該模型可以在工人導航變化的環境時在線估計其意圖。
參與這項研究的另一位研究員Tomislav Petkovic對TechXplore表示:“所建議的基于ToM的柔性機器人倉庫的人類意圖估計算法基于隱馬爾可夫模型運動驗證。” “我們觀察工人的運動,并使用基于廣義Voronoi圖的路徑規劃相對于目標位置進行驗證。然后,這些觀察結果由隱馬爾可夫模型框架處理,該模型可在線估計工人的意圖并能夠處理變化的環境。LAMOR實驗室薩格勒布大學的研究人員開發了該算法的后端:運動驗證和目標估計。”
為了評估模型的有效性,卡爾斯魯厄理工學院的IPR實驗室使用Microsoft Hololens AR眼鏡在小型倉庫測試環境中進行了意向評估實驗。研究人員使用VR技術在大型虛擬倉庫中進行了進一步評估。他們發現,他們的框架可以有效地估計倉庫工人的意圖,而且精度很高。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")