您現在的位置是:首頁 >要聞 > 2020-12-07 15:45:42 來源:
控制蛇形機器人實現高機動性和靈活性
導讀 像蛇一樣的鉸接式移動機器人可以利用其細長的身體進入狹窄的空間并爬上障礙物,并且對于檢查狹窄的空間以及在災難現場進行搜索和救援操作非
像蛇一樣的鉸接式移動機器人可以利用其細長的身體進入狹窄的空間并爬上障礙物,并且對于檢查狹窄的空間以及在災難現場進行搜索和救援操作非常有效。但是,由于它們具有許多致動器,因此很難控制它們的精確運動。
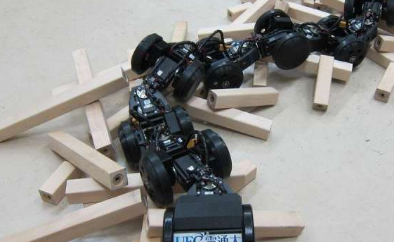
現在,東京電子通信大學的田中元保及其同事提出了控制蛇形機器人以進行三維轉向,爬樓梯和操縱物體的方法,并開發了蛇形機器人T 2蛇3。在三維轉向中,機器人通過放松關節來跟隨周圍的地形,然后從機器人的姿勢恢復運動。通過這種方法,操作員可以輕松地在不平坦的地形上控制和移動機器人。對于爬樓梯,機器人會在適當的時機自動將其在樓梯上的運動從頭到尾轉移,因為附著在機器人底部的傳感器數據被用來觸發運動。為了操縱物體,通過自主選擇抬起/著地的車輪的分配來保持適當的姿勢,從而控制附著在機器人頭部上的抓爪的位置和方向。盡管機器人T 2 Snake-3具有大約30個執行器,但操作員可以使用這些方法和游戲手柄輕松操作機器人。
機器人T 2 Snake-3使用建議的方法進入狹窄的空間,爬上一米高的臺階,爬上樓梯,并旋轉閥門。該蛇狀機器人是為檢驗設備和救災有效控制。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")