您現在的位置是:首頁 >要聞 > 2020-12-03 09:10:35 來源:
RoboBee由柔軟的肌肉提供動力
導讀 RoboBee視線朝向墻壁或撞向玻璃盒的場面可能曾經引起哈佛大學約翰·保爾森工程與應用科學學院(SEAS)哈佛微型機器人實驗室的研究人員的恐慌
RoboBee視線朝向墻壁或撞向玻璃盒的場面可能曾經引起哈佛大學約翰·保爾森工程與應用科學學院(SEAS)哈佛微型機器人實驗室的研究人員的恐慌,但僅此而已。SEAS和Wyss生物啟發工程研究所的研究人員開發了一種具有彈性的RoboBee,該RoboBee由柔軟的人造肌肉驅動,可以撞擊到墻壁,掉落到地板上并與其他RoboBees碰撞而不會受到破壞。這是第一款由軟執行器提供動力以實現受控飛行的微型機器人。
該論文的第一作者,SEAS的前研究生,博士后研究員Yuyu Chen說:“在微型機器人領域,由于移動機器人具有很高的彈性,在移動機器人方面已經取得了巨大的進步。” “但是,該領域的許多人一直懷疑它們可以用于飛行機器人,因為這些執行器的功率密度根本不夠高,而且眾所周知難以控制。我們的執行器具有足夠高的功率密度和可控性。實現懸停飛行。”
這項研究發表在《自然》上。
為了解決功率密度問題,研究人員基于擴展的Tarr系列材料教授David Clarke的實驗室中開發的電動軟致動器。這些軟執行器使用具有良好絕緣性能的絕緣彈性體絕緣彈性體制成,在施加電場時會變形。
通過提高電極的電導率,研究人員能夠以500赫茲的速度操作執行器,這與以前在類似機器人中使用的剛性執行器相當。
處理軟執行器時的另一個挑戰是系統趨于彎曲并變得不穩定。為了解決這一挑戰,研究人員制造了帶有一條垂直約束螺紋的輕型機身,以防止執行器彎曲。
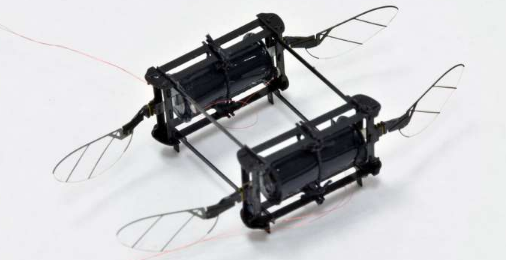
這些小型執行器可以很容易地組裝和更換。為了演示各種飛行能力,研究人員建立了幾種不同型號的軟性RoboBee。兩翼模型可以從地面起飛,但沒有其他控制。四翼,兩個執行器模型可以在雜亂的環境中飛行,一次飛行即可克服多次碰撞。
")









")
")
")
")
")
")
")
")
")