您現在的位置是:首頁 >要聞 > 2020-12-02 08:44:18 來源:
具有社交意識的機器人導航的多目標優化方法
導讀 移動機器人正逐步進入許多人類居住的環境,包括醫院,購物中心和人們的住所。為了使這些機器人與周圍環境中的人類互動,他們應該尊重與他人
移動機器人正逐步進入許多人類居住的環境,包括醫院,購物中心和人們的住所。為了使這些機器人與周圍環境中的人類互動,他們應該尊重與他人共享給定環境相關的許多潛規則。
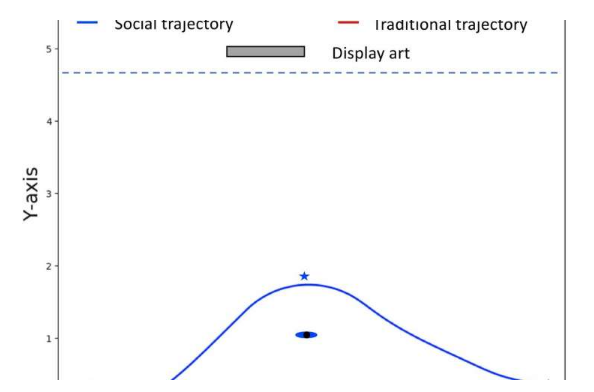
考慮到這一點,內華達州里諾大學的研究人員最近開發了一種非線性,多目標優化方法,該方法可以在移動機器人中實現具有社交意識的導航。這種方法首先在2018年國際機器人和系統會議(IROS)上發表的一篇論文中概述,現在在arXiv上發表,它確保了機器人不會侵入周圍人的個人空間,同時還可以使人機更有效在幾種情況下的交互(HRI)。
“這項研究最初是在我的論文中對機器人和兒童進行研究的一部分,”進行這項研究的研究人員之一大衛·菲爾·塞弗(David Feil-Seifer)告訴TechXplore。“早期的工作涉及為我們希望機器人與孩子互動的環境開發機器人。在這種情況下,我們通過機器人路徑規劃中常用的指標使機器人走了最“有效”的路徑(以最大程度地減少時間運動,使行進的距離最小化,不會撞到任何東西。”
在以前發表在《人機交互》上的一項研究中,Feil-Seifer和他的同事試圖為兒童居住的環境開發機器人導航行為。試點工作表明,機器人可以有效地到達期望的位置而不會撞到任何東西,但研究人員觀察到,兒童通常對機器人的反應較差。
實際上,實驗中使用的機器人通常會遠離兒童,并盡可能快地朝其期望的位置移動。由于這種行為,孩子們認為機器人不想與他們互動。
")









")
")
")
")
")
")
")
")
")