您現在的位置是:首頁 >要聞 > 2020-11-26 09:25:59 來源:
生物啟發算法為機器人團隊產生協作行為
薩里大學的研究人員最近開發出生物形態的啟發自組織算法,可以產生多機器人團隊結構,適應它們在移動環境中,他們的最新研究,刊登在IEEE交易認知和發展系統,由歐洲委員會的FP7計劃部分資助。
薩里大學杰出主席兼首席研究員金耀初教授說:“這項研究可以追溯到我以前在形態發生機器人學上的工作,該工作將生物學形態發生基礎的遺傳和細胞原理應用于諸如機器人群之類的集體系統的自組織。”在研究中,告訴TechXplore。“我們的主要思想是在多細胞生物的細胞與機器人之間建立一個隱喻,包括可重構模塊化機器人的模塊。”
使用自然界中觀察到的形態學原理來產生集體機器人行為的主要優勢在于,這些原理允許機器人以“引導”,“可預測”或“可控制”的方式自我組織。但是,自組織系統(即沒有集中控制的系統)通常也有許多限制。
例如,定義本地交互規則以在這些系統中生成所需的群體行為可能非常具有挑戰性。換句話說,在給定一組定義的本地規則時,很難預測和控制系統的全局行為。
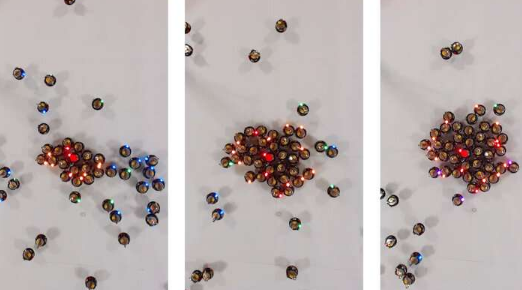
Jin和他的同事們在工作中試圖通過使用簡單的機器人克服這種限制,這些機器人相當基礎,并且無法自我定位。將形態學原理應用于這些“極簡”機器人可以實現更有效的群體行為,例如目標周圍或團隊的形成。
金說:“我們最近的工作與先前的研究之間的主要區別在于,我們使用了非常簡單的機器人(例如,我們在實驗中使用的千斤頂機器人),它們沒有自我定位和定向能力。”
在生物發育中,細胞通過一種稱為形態發生素的化學物質,或更具體地說是形態發生素梯度(即動物體內形態發生素濃度的變化)被引導至所需位置。形態發生梯度可以預先定義,例如在子宮(例如母體形態發生因子)中定義,也可以通過所謂的“形態發育”建立。
在他們的研究中,Jin和他的同事從一種稱為生物形態發生的過程中汲取了靈感,該過程通過細胞隨著生物體的發展而自身產生形態發生子。然后在自然界中將這些形態發生子用于將細胞引導至特定位置,研究人員試圖復制這一原理來引導機器人并改變其群體行為。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
