您現在的位置是:首頁 >要聞 > 2020-11-24 17:08:09 來源:
模型可幫助機器人在搜索對象時像人類一樣思考
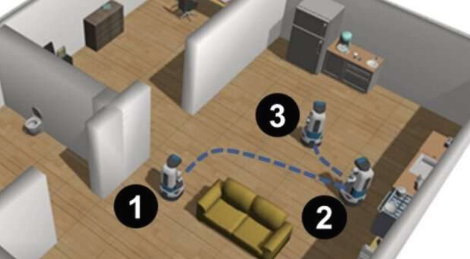
導讀 據密歇根大學的研究,機器人可以通過學習房屋周圍不同物體之間的關系來學習如何更快地找到事物。在本文的一個例子中,一種新模型為機器人提
據密歇根大學的研究,機器人可以通過學習房屋周圍不同物體之間的關系來學習如何更快地找到事物。在本文的一個例子中,一種新模型為機器人提供了視覺搜索策略,可以指導機器人在已經看到冰箱的情況下尋找附近的咖啡壺。
這項工作由Chad Jenkins教授和CSE博士領導。學生Zeng Zeng在2020年機器人技術與自動化國際會議上被授予認知機器人技術最佳論文獎。
機器人專家的共同目標是使機器能夠在現實的環境中導航,例如,我們所度過的無序,不完美的家庭。這些環境可能是混亂的,沒有兩個完全相同,機器人會尋找特定的環境。他們從未見過的物體需要將它們從噪音中剔除。
“能夠有效地在環境中搜索對象對于服務機器人自主地執行任務至關重要,” Zeng說。“我們提供了一種實用的方法,使機器人能夠在復雜的環境中主動搜索目標對象。”
但是房屋并沒有完全混亂。我們圍繞不同類型的活動來組織空間,并且通常將某些組的項目彼此緊鄰地存儲或安裝。廚房通常裝有我們的烤箱,冰箱,微波爐和其他小型炊具;臥室將有我們的梳妝臺,床和床頭柜;等等。
Zeng和Jenkins提出了一種利用這些常見空間關系的方法。他們的“ SLiM”(語義鏈接圖)模型將機器人內存中的某些“地標對象”與其他相關對象以及有關通常如何在空間上定位的數據相關聯。他們使用SLiM來考慮目標對象和地標對象的多個功能,以便使機器人對在環境中如何布置事物有更全面的了解。
他們寫道:“當被問到可以在哪里找到目標物體時,人類能夠給出相對于其他物體的空間關系所表示的假設位置。” “機器人應該能夠類似地推斷物體的位置。”
該模型不僅是不同對象之間通常有多近的硬編碼-從一天到另一天環顧一個房間,您肯定會看到足夠的更改以快速使此工作徒勞。相反,SLiM會考慮對象位置的不確定性。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
