您現在的位置是:首頁 >要聞 > 2020-11-18 13:47:33 來源:
具有折紙風格的機器人指尖具有變形功能
為了執行涉及移動或處理對象的任務,機器人應根據這些對象的屬性和其周圍的環境迅速調整其抓握和操縱策略。到目前為止,大多數已開發的機械手都具有固定的限制結構。因此,它們只能執行有限的運動,并且只能抓住特定類型的對象。
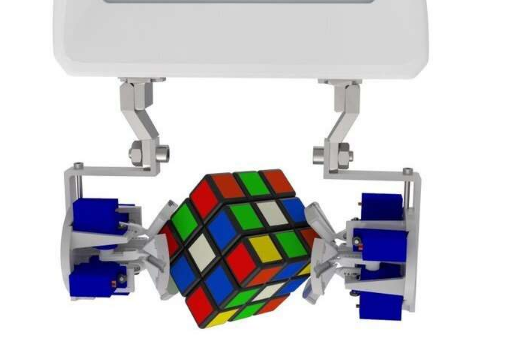
科技大學的研究人員最近開發了一種機械指尖,該指尖可以改變其形狀并在三種不同的配置之間切換,從而可以抓握更多種類的物體。在今年的IEEE自動化科學與工程國際會議(CASE)上發表的一篇論文中概述了這種指尖的獨特設計,其靈感來自日本著名的折紙藝術折紙。
兩位從事這項研究的研究人員Kanzicheng和Zhang Yazhan Zhang通過電子郵件對TechXplore表示:“我們的研究受到了當前研究和工業應用中兩個常見觀察的啟發。” “首先涉及在過去的研究中開發的平行夾持器,這可能有助于實現工業自動化。這些夾持器需要精心選擇的夾持點,否則可能無法實現靜態平衡。”
幾十年來,研究人員一直在嘗試開發技術來控制機械手的抓握姿勢。但是,大多數現有方法都有明顯的局限性,使它們無法很好地在不同對象之間進行概括。Kan,Zhang及其同事進行的這項研究的首要目標是開發一種指尖,該指尖可以輕松控制并且可以執行各種姿勢。
坎和張說:“過去另一個啟發我們研究的發現是,要獲得穩定的抓地力,工程師必須設計一個固定在平行夾具上的專用夾具,以進行操縱,例如拾取和放置等。” “如果將裝配線上的項目更改為不同的形狀,這將很麻煩,這將導致手動更換夾持器的效率低下。我們創建的變形指尖可以幫助減輕或克服這一問題。”
Kan,Zhang及其同事創建的機器人指尖設計基于他們先前研究中介紹的其他機器人結構。例如,在2019年,研究人員創建了一個折紙啟發的,扁平指尖的整體式軟抓手。盡管該抓手也可以變形和改變形狀,但是由于指尖的平坦度和柔軟度,其在有效載荷和靈巧性方面的性能很差。
")





")
")
")
")
")
")
")
")
")
")
")