您現在的位置是:首頁 >要聞 > 2020-11-18 13:37:33 來源:
貓頭鷹啟發的飛行機器人避障系統
在開發機器人系統和計算工具時,計算機科學家經常從動物或其他生物系統中汲取靈感。實際上,根據系統的獨特特征和目的,自然通常會提供一些具體示例,說明如何快速有效地實現其目標。
上海交通大學的研究人員最近開發了一種新的,基于生物視覺和計算機視覺的避障系統,該系統可以改善在動態環境中運行的飛行機器人的導航。該系統在arXiv上預先發表的一篇論文中提出,其靈感來自于貓頭鷹如何發現并避開周圍物體或其他動物。
研究人員寫道:“盡管貓頭鷹無法向任何方向移動眼睛(類似于立體相機),但它們的頸部卻非常靈活,可以旋轉至270度,這使它們能夠在不移動軀干的情況下甚至在后面迅速觀察,”研究人員寫道。在他們的論文中。
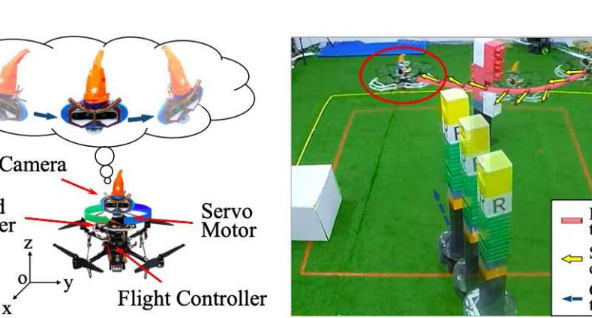
為了復制貓頭鷹沿不同方向移動眼睛并檢測周圍靜止和移動物體的方式,研究人員在四旋翼飛行器(即具有四個旋翼的無人飛行機器人)上安裝了伺服電機和立體攝像機。在設計中,伺服電機充當頸部,而立體攝像機充當頭部。由于立體攝像機的重量輕,它的移動速度可以比機器人的身體快得多,并且其運動幾乎不會影響機器人的運動質量或飛行方向。
該系統使用傳感器計劃算法來估計機器人將從不同方向上的感測對象中受益多少,并計劃其“頭部”(即立體攝像機)應相應旋轉的角度。因此,四旋翼飛機連續不斷地主動感知周圍環境,從而迅速識別出阻礙其前進的障礙。
研究人員開發的主動感知和避免(ASAA)系統的概述。圖片來源:Chen等。
另外,該系統跟蹤并預測在其附近的移動障礙物的軌跡,使它的運動適應周圍環境的變化。最后,基于立體攝像機收集的數據,系統使用基于采樣的路徑規劃器來規劃無碰撞的路徑,概述允許機器人到達特定位置或完成任務而不會與其他機器人發生碰撞的運動物品并被損壞。
研究人員在論文中解釋說:“總的來說,該系統被稱為主動感知與回避(ASAA)系統。” “據我們所知,這是第一個將主動立體視覺應用于飛行機器人避障的系統。”
上海交通大學的研究人員通過在真實環境中進行的一系列實驗評估了他們的ASAAA系統。在這些實驗中,四旋翼飛機要么必須到達期望的位置,以避免其途中的所有障礙,要么必須監視并捕獲一只人造老鼠。這些測試的結果非常有希望,因為該機器人在兩項任務上均表現出色,可以快速適應環境的突然變化,并避免與靜態障礙物和移動障礙物發生碰撞。
而且,研究人員制造的原型使用了一個立體聲相機。因此,它相對便宜。這可以使得更易于大規模制造和實施。
將來,該系統可用于在廣泛的環境中執行任務,從市區到野生生物大量居住的自然環境。該系統還可以基于類似的設計,通過增強的避障功能來激發其他飛行機器人的開發。在他們的下一個研究中,研究人員將嘗試創建可復制其他動物行為的系統,同時還使用強化學習技術進一步改善其系統的感知性能。
")





")
")
")
")
")
")
")
")
")
")
")