您現在的位置是:首頁 >要聞 > 2020-11-13 08:37:25 來源:
研究人員創造了捕蠅機器人
約翰內斯·開普勒大學研究人員的國際團隊正在開發由軟材料制成的機器人。《通訊材料》雜志上的一篇新文章演示了這類軟機如何利用弱磁場快速移動,甚至抓住落在其上的快速移動的蒼蠅。
馬丁·卡爾滕布倫納(Martin Kaltenbrunner)說,當我們想象移動的機器(例如機器人)時,我們想象的東西很大程度上是由硬質材料制成的。他和JKU的軟物質物理系以及LIT軟材料實驗室的研究人員一直在努力構建基于軟材料的系統。在創建這類系統時,存在一個基本的基本概念,即創建有利條件,以支持將來機器人與人之間的緊密交互,而不會導致堅固的機器對人的身體造成傷害。
穩定,可拉伸且靈活
6月,科學家提出了一種用于電磁電動機的新方法。代替銅線和鐵,彈性材料和液體金屬現在形成用于所謂的致動器的基本成分。科學家最近還在《自然材料》雜志的一篇文章中介紹了一種新型的生物凝膠,該凝膠具有足夠的彈性,柔韌性和穩定性,可以與電子組件結合使用,從而創建一種“軟機器人”。
由Kaltenbrunner和Denys Makarov(位于德累斯頓-羅森多夫的亥姆霍茲中心)領導的團隊現在正在進一步開發這類機器。兩位研究人員指出,以前的缺點是這些無線設計的軟機器人只能非常緩慢地改變形狀。他們的新想法是基于使用柔性塑料聚二甲基硅氧烷并在磁性微粒(例如釹,鐵和硼的合金)中混合。
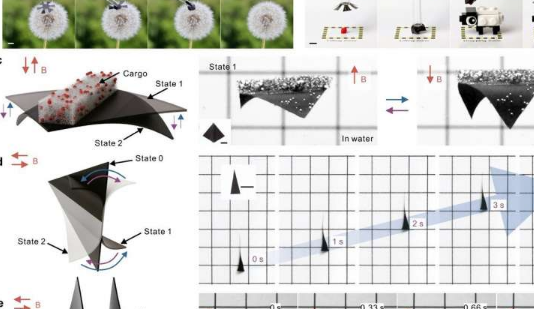
研究人員給他們的小型,柔軟的機器人不同的形狀。根據形狀,微粒放置的位置以及所用材料的厚度,當機器人暴露在環境中變化的磁場中時,它們能夠以不同的方式移動。這些執行器的厚度只有幾微米,重量只有幾微克,因此移動所需的能量很小。此外,這些組件可以重復運動數百萬次,而無需任何更改。
懸停,游泳,捉蒼蠅
通過影響和改變磁場,Kaltenbrunner和他的同事成功地制造了微型機器人,它們可以盤旋,游泳和(從廣義上來說)甚至可以行走。他們還表明,在短短的幾毫秒內,他們的花形機器人可以捕捉到落在上面的蒼蠅。
")









")
")
")
")
")
")
")
")
")