您現在的位置是:首頁 >要聞 > 2020-11-04 10:41:34 來源:
具有尾部狀結構的自平衡機器人
對于工程師和計算機科學家開發新技術工具而言,自然是最大的靈感來源之一。在過去的十年左右的時間里,機器人學家已經開發出了無數機器人,它們受到蛇,魚,獵豹,鳥類,昆蟲和其他動物的行為和生物學機制的啟發。
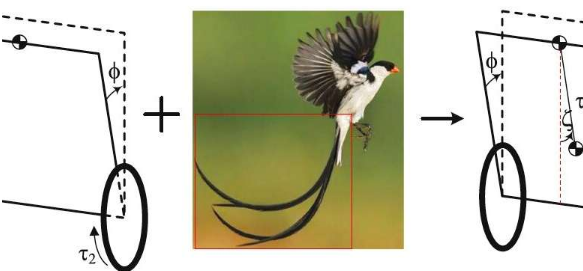
北京理工大學的研究人員最近設計了一種新型的受生物啟發的機器人,該機器人可以使用類似尾巴的機制保持其平衡。該機器人由施普林格(Springer)在2020年中國智能系統會議論文集上發表的論文中介紹,由主體,兩個輪子和受尾部啟發的組件組成,可幫助其保持平衡。
機器人的“尾巴”由自適應分層滑模控制器控制,允許它在平行于機器人車輪的區域內沿不同方向旋轉。本質上,該控制器定義并實現了類似尾巴的組件的移動,從而確保它們在機器人導航周圍環境時增強了機器人的穩定性。
為了使機器人在動態或變化的環境中移動時保持平衡,控制器使用不確定性的估計值。人造“尾巴”以特定的模式運動,這些模式旨在提高機器人的穩定性,并使用所謂的Lyapunov穩定性定理進行計算。Lyapunov穩定性是由俄羅斯數學家和物理學家Aleksandr Lyapunov提出的描述動力學系統穩定性的理論結構。
用于平衡兩個車輪的車輛的大多數現有方法都是通過使用慣性測量單元(IMU)收集車輛的車身高度數據來工作的。IMU是電子設備,可以測量作用在身體或物體上的比力以及角速度,方向等。平衡兩輪機器人的常規方法機器人通過控制器組件處理IMU設備收集的數據,然后相應地實施平衡策略,通常是通過調整傾斜角度來實現的。
盡管這些方法中的許多方法均取得了令人滿意的結果,但研究人員提出的設計提出了一種可行的替代方案,該方案無需通過輪式電動機來調整機器人的傾斜角度。它是現有的為數不多的增強輪式機器人平衡性的技術之一,同時考慮到了由動物的尾巴引起的環境不確定性。
研究人員通過一系列模擬評估了類似尾巴的機器人機制的有效性。他們的發現很有希望,因為當機器人在此模擬環境中失去平衡時,人造“尾巴”能夠在大約3.5秒內重新平衡。此外,他們發現他們創建的控制器組件對噪聲和干擾特別堅固。
將來,該研究人員團隊開發的類似尾巴的機制可能會被采用,以增強其他現有或新開發的機器人的穩定性和平衡性。此外,作為這項研究的一部分而收集的發現可能會啟發其他機器人專家設計類似的尾巴狀部件。
到目前為止,北京理工大學的研究人員僅在仿真中評估了他們的自動平衡機器人,因此他們尚未確定其在有形物理環境中的有效性。在接下來的研究中,他們計劃構建機器人的原型并進行進一步的實驗,以測試其在實際場景中的性能。
")





")
")
")
")
")
")
")
")
")
")