您現在的位置是:首頁 >綜合 > 2020-12-17 08:52:46 來源:
將空間概念注入機器人系統的新方法
索邦大學(SorbonneUniversités)和CNRS的研究人員最近基于機器人的感覺運動流,研究了在機器人系統中出現簡化空間概念的前提條件。他們的研究預先發表在arXiv上,是一個較大項目的一部分,其中他們探討了如何將基本的感知概念(例如,身體,空間,物體,顏色等)灌輸到生物或人工系統中。
到目前為止,機器人系統的設計主要反映了人類感知世界的方式。但是,僅憑人類直覺設計機器人可能會將其感知僅限于人類所經歷的感知。
為了設計完全自主的機器人,研究人員可能需要擺脫與人類有關的構造,從而使機器人代理能夠發展自己的感知世界的方式。根據Sorbonne大學和CNRS的研究人員小組的說法,機器人應該完全通過分析其感覺運動體驗并確定有意義的模式來逐步發展自己的感知概念。
進行這項研究的研究人員之一亞歷山大·特列霍夫(Alexander Terekhov)對TechXplore表示:“一般的假設是,沒有人對生物體給出感知概念。” “相反,這些概念是隨著時間的推移而發展起來的,它們是有用的工具,可以幫助他們理解不斷暴露的大量感覺運動數據。結果,青蛙的空間概念很可能與蝙蝠的空間概念有所不同。反過來,它又不同于人類,因此,在構建機器人時,我們應該給它什么空間的概念呢?如果我們想讓機器人真正地智能化,我們就不應該使用抽象概念來構建它們,而應該提供他們使用的算法將使他們能夠自己開發這些概念。”
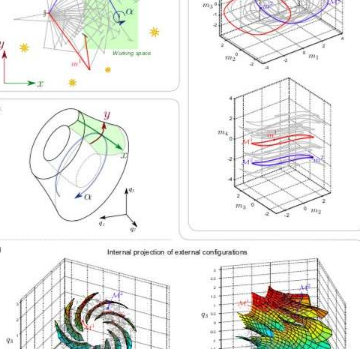
Terekhov和他的同事表明,不能僅憑外在感受信息來推論空間獨立于環境的概念,因為這種信息根據在環境中所發現的東西而有很大差異。通過研究將電動機命令與代理外部刺激變化相關聯的功能,可以更好地定義此概念。
捷列霍夫說:“重要的見識來自法國著名數學家亨利·龐加萊(Henri Poincare)的一項古老研究,他對人們如何從人類感知中發展出通??用數學尤其是幾何學感興趣。” “他建議感覺輸入的巧合可能起關鍵作用。”
")





")
")
")
")
")
")
")
")
")
")