您現在的位置是:首頁 >生活 > 2020-11-25 09:26:27 來源:
研究人員將計算機視覺和不確定性納入機器人假肢的AI中
研究人員已經開發出可以與現有硬件集成的新軟件,從而使使用機器人假肢或外骨骼的人們能夠以更安全,更自然的方式在不同類型的地形上行走。新框架將計算機視覺整合到假肢腿部控制中,并包括強大的人工智能(AI)算法,該算法可使軟件更好地解決不確定性問題。
“下肢機器人假肢需要根據用戶所走的地形來執行不同的行為,”有關這項工作的論文的合著者,北卡羅來納州立大學電氣與計算機工程副教授埃德加·洛巴頓說。“我們創建的框架允許機器人假肢中的AI預測用戶將要踏入的地形的類型,量化與該預測相關的不確定性,然后將該不確定性納入其決策。”
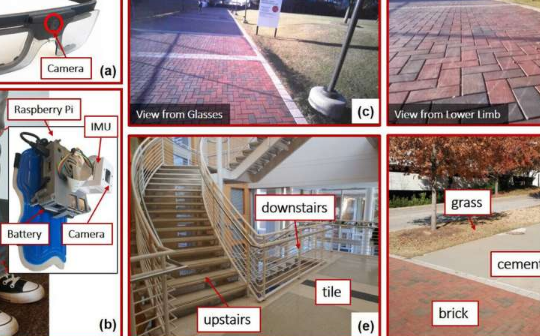
研究人員專注于區分需要調整機器人假肢行為的六個不同地形:瓷磚,磚塊,混凝土,草,“樓上”和“樓下”。
“如果不確定性程度過高,則不會迫使AI做出可疑的決定-它可能會通知用戶它對自己的預測沒有足夠的信心采取行動,或者可能默認為'安全“模式”,該論文的主要作者,最近獲得博士學位的鐘伯冠說。畢業于數控州。
新的“環境上下文”框架結合了硬件和軟件元素。研究人員設計了該框架,使其可用于任何下肢機器人外骨骼或機器人假肢設備,但還需要另外一個硬件:攝像頭。在他們的研究中,研究人員使用了戴在眼鏡上的照相機和安裝在下肢假體本身上的照相機。研究人員評估了AI如何分別和同時使用兩種相機的計算機視覺數據。
該論文的合著者Helen Huang說:“將計算機視覺集成到可穿戴機器人的控制軟件中是令人興奮的新研究領域。” “我們發現同時使用兩個攝像頭效果很好,但是需要大量的計算能力,并且可能會抑制成本。但是,我們還發現,僅使用安裝在下肢上的攝像頭效果很好,尤其是對于近期預測而言,例如下一兩步的地形。” Huang是北卡羅萊納州立大學和北卡羅來納大學教堂山分校聯合生物醫學工程系的杰克遜家族生物醫學工程杰出教授。
但是,最重要的進步是AI本身。
Lobaton說:“我們提出了一種更好的方法來教深度學習系統如何評估和量化不確定性,從而使系統將不確定性納入其決策中。” “這當然與機器人修復術有關,但是我們在這里的工作可以應用于任何類型的深度學習系統。”
為了訓練AI系統,研究人員將攝像機連接到身體強壯的人,然后這些人走過各種室內和室外環境。然后,研究人員通過讓下肢截肢者在穿越相同環境時佩戴相機來進行概念驗證評估。
Lobaton說:“我們發現該模型可以適當地轉移,因此該系統可以處理來自不同人群的對象。” “這意味著即使認為AI由一組人訓練并且被其他人使用,該AI也能很好地工作。”
但是,新框架尚未在機器人設備中進行測試。
Huang說:“我們很高興將框架整合到用于工作的機器人假肢的控制系統中,這是下一步。”
Zhong表示:“而且,我們還計劃研究方法,使系統效率更高,所需的視覺數據輸入更少,數據處理更少。”
")





")
")
")
")
")
")
")
")
")
")