您現在的位置是:首頁 >生活 > 2020-11-25 09:26:30 來源:
科學家給軟機器人以感覺
導讀 機器人技術中最熱門的主題之一是軟機器人領域,該領域使用的是柔軟和柔性的材料,而不是傳統的剛性材料。但是軟機器人由于缺乏良好的感知而
機器人技術中最熱門的主題之一是軟機器人領域,該領域使用的是柔軟和柔性的材料,而不是傳統的剛性材料。但是軟機器人由于缺乏良好的感知而受到限制。好的機械手需要感覺到它正在觸摸的東西(觸覺),并且需要感覺到手指的位置(本體感覺)。大多數軟機器人都缺少這種感應。
在新的論文中,麻省理工學院計算機科學與人工智能實驗室(CSAIL)的研究人員提出了新工具,以使機器人更好地感知與之交互的對象:查看和分類項目的能力以及更柔和細膩的觸感。
CSAIL主任說:“我們希望通過感受世界來看到世界。柔軟的機械手具有感應皮膚,可以使它們拾取各種物體,從諸如土豆片的細膩物體到諸如奶瓶的重物。” Daniela Rus,Andrew和Erna Viterbi電機工程與計算機科學教授,麻省理工學院斯蒂芬·A·史瓦茲曼計算機學院的研究副主任。
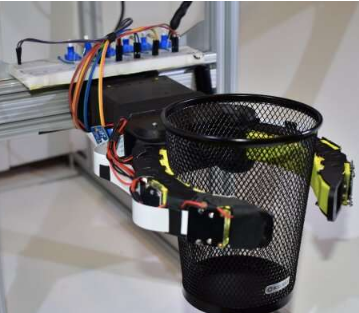
一篇論文以麻省理工學院和哈佛大學去年的研究為基礎,在那里,一個團隊開發了一種柔軟而結實的機器人抓手,其形式為錐形折紙結構。它會像維納斯的捕蠅器一樣塌陷在物體上,以拾取重量是其重量100倍的物品。
為了使新發現的通用性和適應性更接近于人的手,一個新團隊提出了一個明智的選擇:由與壓力傳感器連接的乳膠“氣囊”(氣球)制成的觸覺傳感器。新的傳感器使抓取器不僅可以拾取像薯片一樣細膩的物體,還可以對它們進行分類-使機器人可以更好地了解其拾取的物體,同時還表現出輕微的觸感。
在對物體進行分類時,即使物體滑脫,傳感器也能正確識別10個物體,準確率超過90%。
")





")
")
")
")
")
")
")
")
")
")